

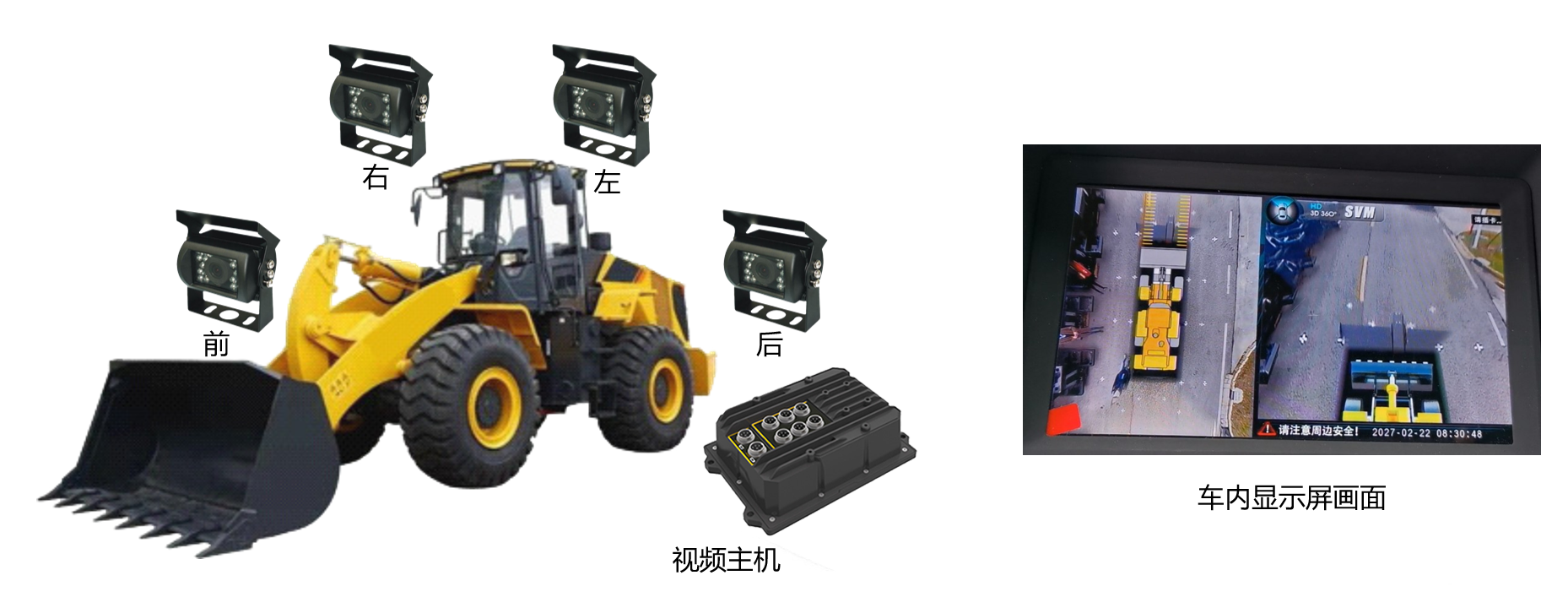
360度全景影像
• 在车辆的前后左右位置安装四个全景摄像头,捕捉车辆四周的画面,通过360主机的算法运算,最终呈现出车辆四周的全景画面
• 若车辆过长,可在左右两侧增加摄像头数量(最大可加至6路),来达到全景覆盖的效果
• 前行车轨迹,车辆前后车架连接处,装有霍尔传感器,与360主机相连接,通过测量外部磁场的变化来实时显示车辆行进的轨迹,对行走状态进行提前预判
• 倒车轨迹,当车辆挂入倒挡时,显示器主图像显示区域显示车辆倒车画面,车辆轨迹线由前切到后。
应用案例

前后行车轨迹
• 前行车轨迹,车辆前后车架连接处,装有霍尔传感器,与360主机相连接,通过测量外部磁场的变化来实时显示车辆行进的轨迹,对行走状态进行提前预判
• 倒车轨迹,当车辆挂入倒挡时,显示器主图像显示区域显示车辆倒车画面,车辆轨迹线由前切到后
